PicoScope 7 Software
Available on Windows, Mac and Linux
A to Z of PC oscilloscopes
Everything you need to know about PC oscilloscopes from Advanced Triggers to Zooming.

A to Z of Data Loggers
Everything you need to know about PC-based data loggers from Alarms to Zooming.
Application Notes
Details of some of the many applications for Pico data logger and oscilloscope products.

How do I measure...?
Find out how you can measure using Pico products

Videos
Showing you how to get the most out of PicoScope oscilloscope software.

Documentation
Up-to-date versions of the documentation supplied with your products in PDF format.

Educational Experiments
Our library of science experiments suitable for use with oscilloscope and data logging products.

PicoApps
Want to share hints, tips and code with other developers? Show your Pico-based products to the world.

Newsletter
Archive of our monthly Test and Measurement Newsletters.

The PicoScope 6 software and PicoScope drivers, supplied with all PicoScope oscilloscopes, are constantly being improved to give faster data transfer over the USB interface. The improvements have focused on streaming mode, one of the two data transfer modes used by PicoScope devices (the other is block mode). When you use PicoScope 6, you rarely need to know the difference between the two modes as the software switches automatically between them. If, on the other hand, you are writing your own software using the PicoScope Application Programming Interface (API), it helps to know that you can capture large volumes of data at high speed by selecting streaming mode.
This note explains how streaming mode works, and what scope performance you can expect when using PicoScope 6 or the PicoScope API.
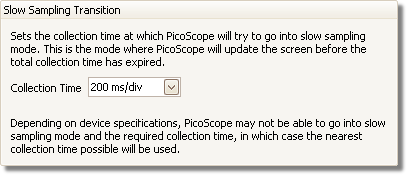
Figure 1 – PicoScope 6 Preferences / Sampling dialog
In streaming mode, PicoScope 6 tells the scope to capture data continuously and, at the same time, to transfer each sample to the PC with minimum delay. The amount of streamed data that PicoScope 6 can store is limited by design, to prevent the program from consuming too much of the PC’s resources. For example, with a 4000 Series scope, PicoScope 6 can create a streamed data file of up to 100 Msamples (sum of all active channels).
PicoScope 6 limits the sampling rate to 10 MS/s in streaming mode for most scopes, again to conserve the PC’s resources. If you request a faster sampling rate, the program switches to block mode. PicoScope 6 does this mode switching automatically, but you can change the collection time at which the transition happens by going to the Preferences menu (Figure 1).
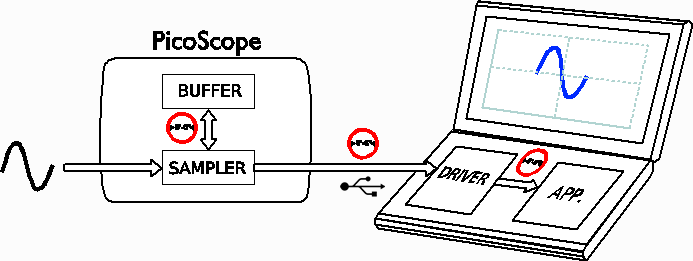
Figure 2 – The main data bottlenecks: the scope buffer, the USB interface and the driver
When you write your own application using the PicoScope API, you can choose whether to use block mode or streaming mode. If the amount of data that you need to capture will fit in the scope’s buffer memory, then you should use block mode as this will give you the widest choice of sampling rates. If record length is more important to you than sampling rate, then you should choose streaming mode.
In streaming mode, just like PicoScope 6, the PicoScope driver tells the scope to capture data continuously and then to transfer each sample or small group of samples to the PC with minimum delay. The driver stores the data in its own buffer and then sends a signal to the application. The application must then copy the data before the driver overwrites the buffer with new data. Once the application has its own copy of the data, it can create a record whose length is limited only by the resources of the PC.
There are several factors that limit the performance of the scope in streaming mode. One is that the scope’s buffer memory is simultaneously receiving sampled data and transmitting it to the USB interface, so the maximum sampling rate for some scope types may be less than in block mode. The other limitations are the transfer speeds of the USB interface and the driver. However, development work on the PicoScope hardware and drivers has been steadily pushing these speeds upwards. PicoScope oscilloscopes can transfer data at a typical rate of 20 MS/s in streaming mode over USB 2.0, with the exact rate depending on the capability of the PC and the drivers.
As the table below shows, some scopes can sample faster than others in streaming mode. PicoScope 6 limits the sampling rate to avoid overloading the USB interface or slowing down the PC, while obtaining enough data to display a clear scope trace at an acceptable update rate. Sampling rates are stated for single-channel operation.
The theoretical maximum speed of the USB 2.0 interface for streaming data, after deducting all overheads, is about 40 MB/s. Under optimum conditions, with no unnecessary processes running, our tests have achieved speeds of about 30 MB/s. This is equivalent to 30 MS/s for 8-bit scopes or 15 MS/s for 12-bit scopes.
USB 3.0 is about ten times faster, with a theoretical maximum transfer rate of about 400 MB/s. USB 3.0 PicoScopes have exceeded 300 MS/s in tests.
As the table below shows, some scopes can sample faster than this in streaming mode. To avoid overflowing their internal buffer, you can use data aggregation to compress the sampled data to a rate that can be transmitted on the bus. (Data aggregation is explained below.) In some cases it may still not be possible to sample for sustained periods at the highest sampling rates listed here.
Your own application can create records of any length allowed by the programming environment and operating system.
| Oscilloscope series | Maximum specifications (streaming mode) | ||
|---|---|---|---|
| PicoScope 6 | PicoScope 6 | API | |
| Model | Record length | Sampling rate | Sampling rate |
| PicoScope 2204A & 2205A | 2 MS | 1 MS/s | 1 MS/s |
| PicoScope 2000 | 100 MS | 9.6 MS/s[1] | 31 MS/s[1] |
| PicoScope 3000D | 100 MS | 17 MS/s[1] | 125 MS/s[1] |
| PicoScope 4262 | 100 MS | 10 MS/s[1] | 10 MS/s[1] |
| PicoScope 4444 | 100 MS | 16.67 MS/s[1] | 50 MS/s[1] |
| PicoScope 4000A | 100 MS | 20 MS/s[1] | 80 MS/s[2] |
| PicoScope 5000D | 100 MS | 15 to 20 MS/s[1] | 125 MS/s (8-bit)[1] |
| PicoScope 6000E | 100 MS | 20 MS/s[1] | 312 MS/s (8-bit)[1] |
| Discontinued: | |||
| PicoScope 2100 | 64 kS | 1 kS/s | 1 kS/s |
| PicoScope 2200 | 2 MS | 6.6 MS/s[1] | 6.6 MS/s[1] |
| PicoScope 2205 MSO | 100 MS | 10 MS/s[1] | > 20 MS/s[1] |
| PicoScope 2206A to 2208A | 100 MS | 9.6 MS/s[1] | 31.25 MS/s[1] |
| PicoScope 3204/5/6 | 64 kS | 1 kS/s | 1 kS/s |
| PicoScope 3207A 3207B | 100 MS | 10 MS/s[1] | 125 MS/s[1] |
| PicoScope 3224 & 3424 | 2 MS | 6.6 MS/s[1] | 6.6 MS/s[1] |
| PicoScope 3000A/B | 100 MS | 1 MS/s | 10 MS/s[1] |
| PicoScope 4224 & 4424 | 100 MS | 10 MS/s[1] | 10 MS/s[1] |
| PicoScope 4824 | 100 MS | 20 MS/s[1] | 80 MS/s[2] |
| PicoScope 5203 & 5204 | 20 MS | 10 MS/s[1] | > 10 MS/s[1] |
| PicoScope 5000A/B | 100 MS | 10 MS/s[1] | 10 MS/s[1] |
| PicoScope 6000 | 100 MS | 10 MS/s[1] | 10 MS/s[1] |
| PicoScope 6000A/B | 100 MS | 10 MS/s[1] | > 10 MS/s[1] |
| PicoScope 6000C/D | 100 MS | 20 MS/s[1] | > 150 MS/s[1] |
[1] Sampling rate is shared between channels.
[2] 80 MS/s on one channel or 160 MS/s shared between >1 channels.
There are some situations in which we might want to reduce the number of samples after capturing them in streaming mode. This can occur in PicoScope 6 when the scope has captured more samples than the number of pixels across the display. It can also occur with the PicoScope API, for reasons that will be unique to each application. All of these cases call for some method of data reduction.
Instead of just throwing away the excess samples (which is called decimation: see Figure 3b), it is better to use signal processing to preserve as much of the original information as possible. In general, this type of processing is called aggregation. PicoScope does this by recording the minimum and maximum values of the missing samples, a process called peak detection (see Figure 3c). Whereas decimated data can give a false impression of smoothness and sometimes the added problem of aliasing (the creation of spurious frequencies that were not in the original signal), peak-detected data always shows the full range of values. Some PicoScope products do the peak-detection in the oscilloscope hardware, while others do it in the Pico driver software. Whichever method your scope uses, the PicoScope hardware and software are designed to give you optimal performance without throwing away vital information.

Figure 3a - Original sampled data. Note the glitch in the second pulse.

Figure 3b - Data decimated by 3 in 4. The glitch has been lost in the decimation process.

Figure 3c - Peak-detected data (method used by PicoScope). Although the shape of the glitch is lost, its peak value is still visible.
| API | Application Programming Interface |
| GS | gigasamples (230 samples) |
| MB | megabytes (220 bytes) |
| MS | megasamples (220 samples) |
AR024-2






